
Page 101 - Demo
P. 101
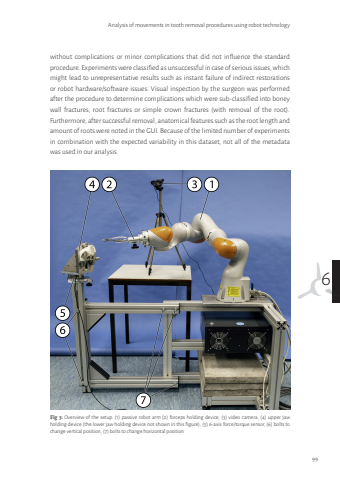
6Analysis of movements in tooth removal procedures using robot technology99without complications or minor complications that did not influence the standard procedure. Experiments were classified as unsuccessful in case of serious issues, which might lead to unrepresentative results such as instant failure of indirect restorations or robot hardware/software issues. Visual inspection by the surgeon was performed after the procedure to determine complications which were sub-classified into boney wall fractures, root fractures or simple crown fractures (with removal of the root). Furthermore, after successful removal, anatomical features such as the root length and amount of roots were noted in the GUI. Because of the limited number of experiments in combination with the expected variability in this dataset, not all of the metadata was used in our analysis.Fig 3: Overview of the setup. (1) passive robot arm (2) forceps holding device, (3) video camera, (4) upper jaw holding device (the lower jaw holding device not shown in this figure), (5) 6-axis force/torque sensor, (6) bolts to change vertical position, (7) bolts to change horizontal positionTom van Riet.indd 99 26-10-2023 11:59
